Gelenke und Gelenkfreiheiten
Gelenke
Ein Gelenk ist die bewegliche Verbindungsstelle zweier Getriebeglieder. Es hat die Aufgabe, die dauernde gegenseitige Berührung der Getriebeglieder unter Gewährleistung ihrer relativen Beweglichkeit zu sichern. Es besteht aus 2 Gelenkelementen, die eine zueinander passende (zweckvolle) geometrische Formen haben müssen. (Bsp.: Zapfen – Lagerschale; 2 Zahnräder)
Gelenke können nach der Berührungsart sowie anhand ihres Gelenkfreiheitsgrades
- Punktkontakt: z.B. Kugel/Ebene
- Linienkontakt: z.B. Zylinder/Ebene
- Flächenkontakt: z.B. Ebene/Ebene
 Punktkontakt
Punktkontakt Linienkontakt
Linienkontakt Flächenkontakt
FlächenkontaktWeitere Möglichkeiten zur Unterscheidung der Gelenke sind folgende:
- Form der Relativbewegung der miteinander verbundenen Glieder: z.B. Drehen, Schieben, Schrauben und deren Kombination
- Art der Paarung der Gelenkelemente: z. B. Kraft- oder Formschluss
- Bewegungsverhalten an der Kontaktstelle: z.B. Gleiten, Wälzen und deren Kombination
Das Bewegungsverhalten sowie die Art der Berührung der Gelenkelemente an der Kontaktstelle haben einen entscheidenden Einfluss auf die Beanspruchung und den Verschleiß der Gelenke.
Gelenkfreiheitsgrad und Unfreiheiten
Gelenkfreiheitsgrad
Der Gelenkfreiheitsgrad
Der räumliche Gelenkfreiheitsgrad ist:
Beispiele: 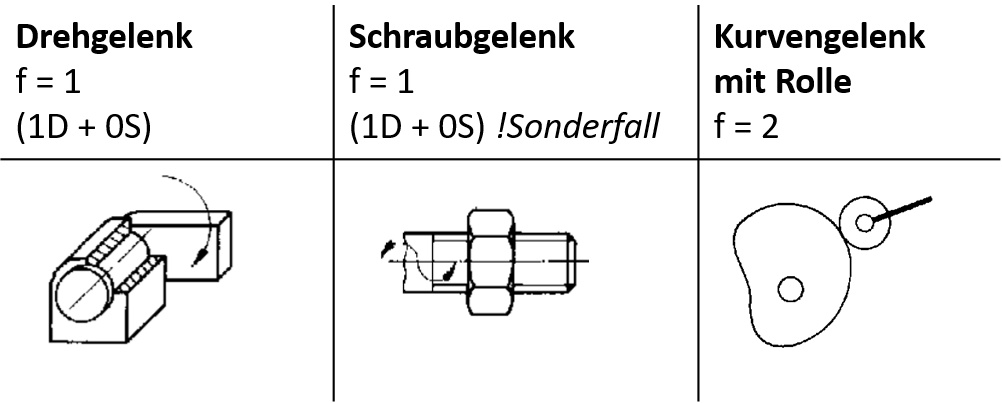
Unfreiheiten
Die durch das Gelenk verhinderten Einzelbewegungen werden als Unfreiheiten
Bewegungsgrad
Der Bewegungsgrad
Überbestimmung
Der Grad der Überbestimmung

Drehungen
Gelenkfreiheitsgrad
Anzahl Kontaktstellen
Freiheitsgrade an den Kontaktstellen
Überbestimmung

Drehungen
Gelenkfreiheitsgrad
Anzahl Kontaktstellen
Freiheitsgrade an den Kontaktstellen
Überbestimmung