Ermittlung von Führungsgliedern mit zwei Drehgelenken
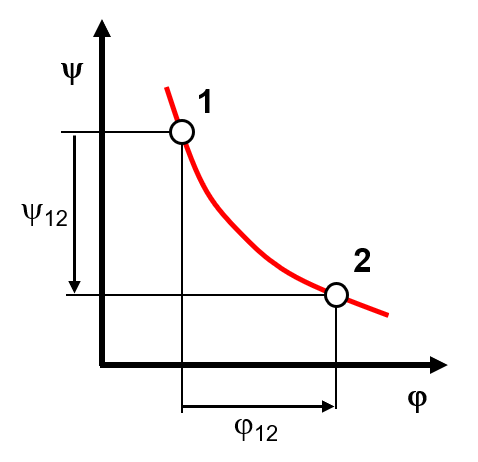
Übertragung von Schwingbewegungen (Winkel-Winkel-Zuordnung)
Zweilagenzuordnung
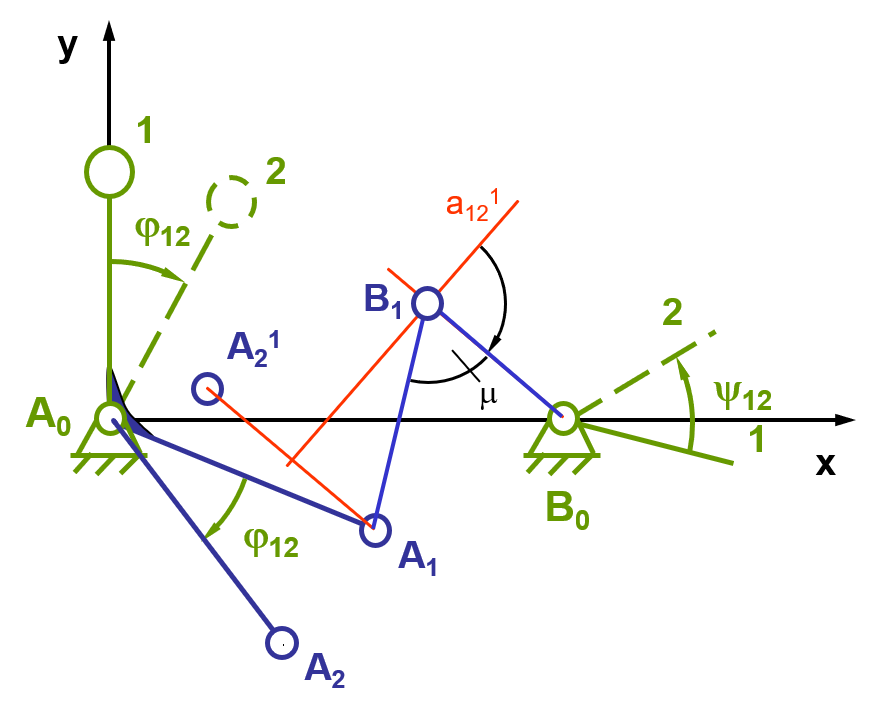
Gesucht ist ein Viergelenkgetriebe, das einen Schwingwinkel
Vorgehen
- Wahl von
- Mittelsenkrechte
- Wahl von
günstig:
Winkel zwischen
Bemerkung:
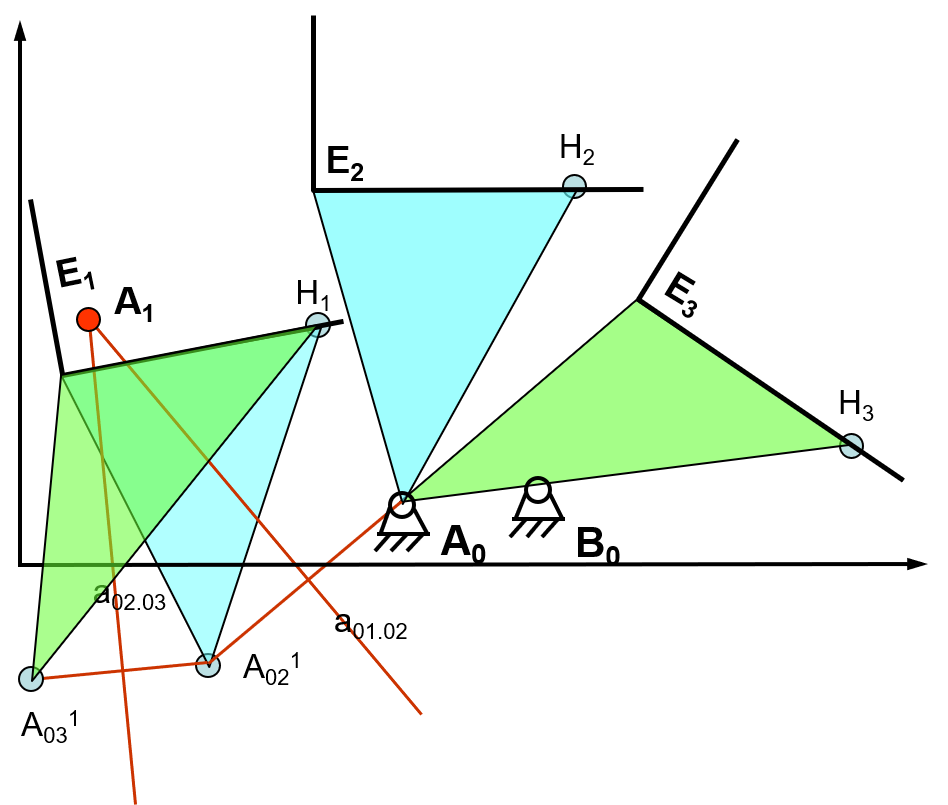
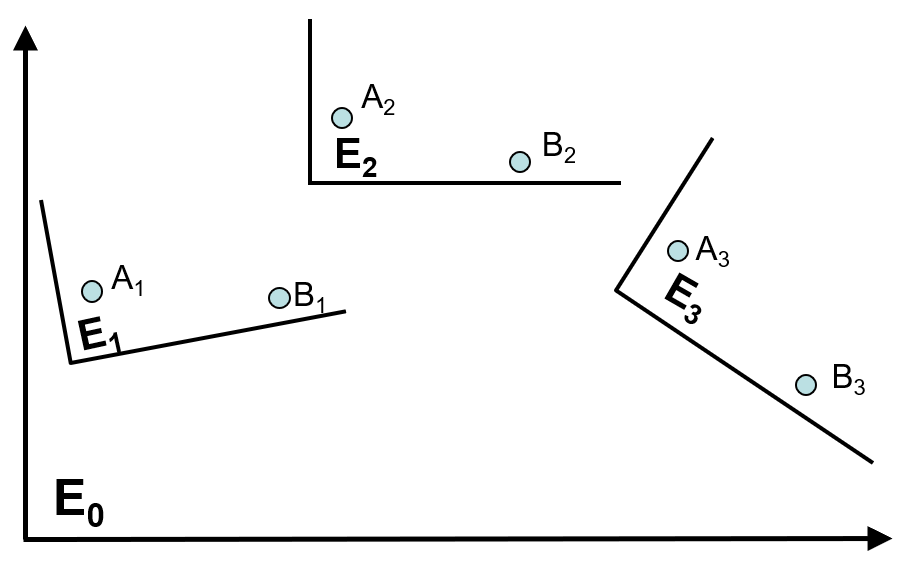
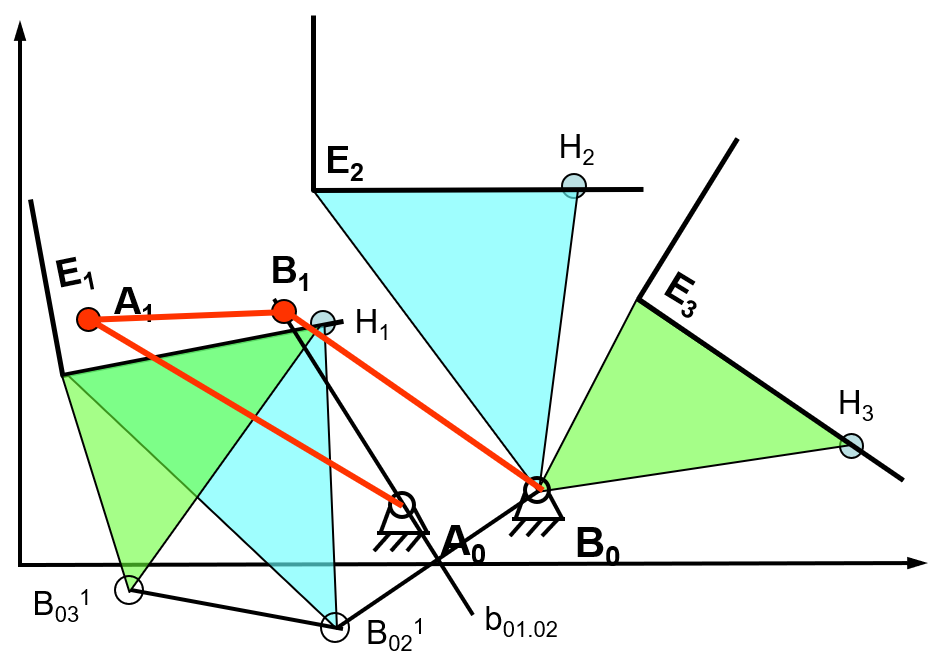
Drei Lagen einer Ebene
gegebene Gelenkpunkte
geg.:
Viergelenkgetriebe
3 Lagen
Gelenkpunkte
Viergelenkgetriebe
Vorgehen
-
-
-
-
-
-

gegebene Gestellgelenkpunkte
geg.:
Viergelenkgetriebe
3 Lagen
Gestellgelenkpunkte
Viergelenkgetriebe

Vorgehen
- Wahl eines Hilfspunktes
- Mithilfe eines Transparentpapiers (TP) wird die Ebene
- Mithilfe eines Transparentpapiers (TP) wird die Ebene
- Im Anschluss werden die relativen Lagen von
- Der Gelenkpunkt
-
-
-
- Die Ermittlung des Gelenkpunktes
Hinweis: