KIRa - Kooperative Interaktion von Radfahrern mit automatisierten Fahrzeugen
Cooperative behavior is essential for ensuring safety and comfort in shared traffic spaces. While human drivers can often identify behavioral cues from other road users to predict their movements, autonomous vehicles lack this ability. This is particularly problematic in interactions with vulnerable road users (VRUs), such as cyclists. The goal of this project is to develop, evaluate, and compare various methods for forecasting cyclist trajectories, with the aim of estimating their behavioral intentions. By accurately predicting the trajectory of a cyclist, an autonomous vehicle can proactively plan a cooperative response and ensure a smooth traffic flow while enhancing safety for all road users. This project was funded within the Priority Program 1835 “Cooperative Interacting Cars” of the German Science Foundation DFG.
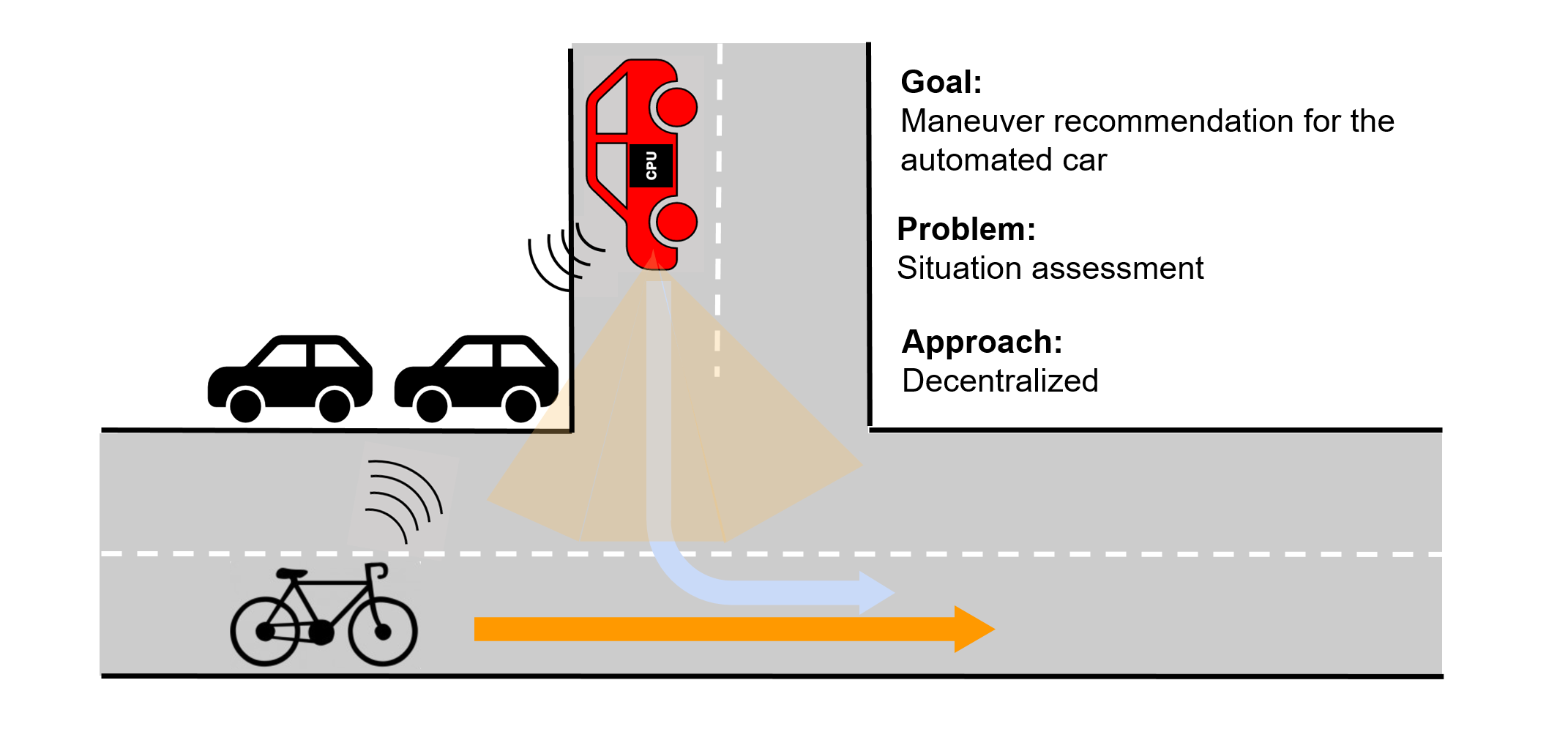
Example Scenario: A cyclist and an automated car approaches an intersection. A correct situation assessment is crucial to ensure a smooth traffic flow.
![]()