FRANKA RESEARCH 3
The Panda Research 3 robot arm is a highly advanced robotic manipulator designed for versatile research applications. Developed by leading robotics company Franka Emika, the Panda Research 3 combines precision, flexibility, and intuitive control to enable a wide range of scientific investigations. Equipped with seven degrees of freedom, the robot arm can perform intricate tasks with exceptional dexterity and accuracy. Its modular design allows for easy customization and integration of additional sensors and tools, making it adaptable to various experimental setups. With advanced motion planning algorithms and advanced safety features, the Panda Research 3 offers researchers a reliable and efficient platform for exploring complex manipulation tasks, human-robot collaboration, and cutting-edge automation research.
Active Projects
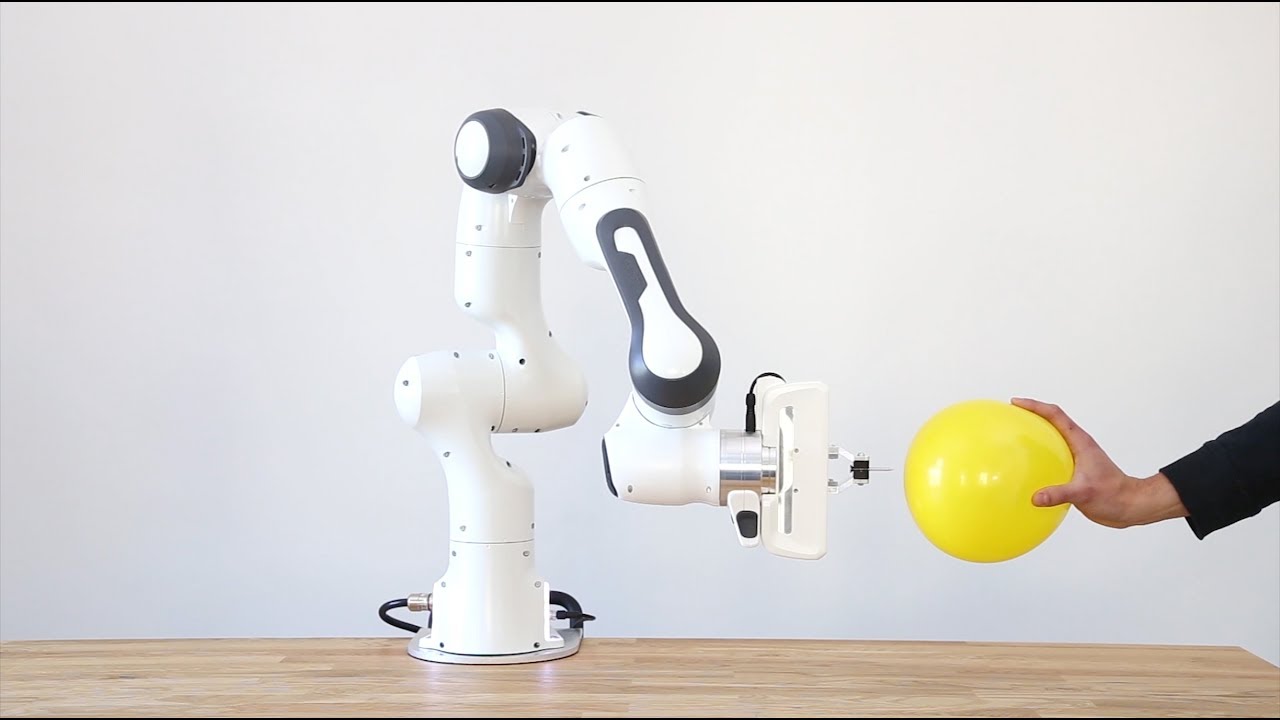
This robotic arm can be used for all kinds of research purposes due to its various sensors and easy controllability. It is already widely used in science to test different manipulation, pick and place and other methods. You can also attach a Humanlike Robot Hand to it, as well as your own components. For example, a special plate has already been 3D printed for our robot so that a specific depth camera can be attached to the end-effector.
Humanoid Robotik

The students enrolled in the "Humanoid Robotics" practical course are tasked with teaching a robot how to play Jenga. Throughout the project, they will explore different methods for obtaining and processing sensory input from the environment. This includes utilizing a camera to recognize individual pieces of the Jenga tower. They will also learn how to calculate the kinematics for the motion of a 7-joint robot and how to make the robot move collision-free in an environment. Additionally, students will discover how the robot can interact with the environment and observe its feedback.
Past Projects
Joint Space Control via Deep Reinforcement Learning using a population-coded Spiking Actor Network
 In the realm of domestic environments, the adaptability of robots to dynamic conditions is crucial. Deep Reinforcement Learning stands as an available tool to grant robots the ability to acquire dynamic behavioural policies independently. However, the current iteration of Deep Neural Networks consumes a substantial amount of energy, thereby directly impacting the operational longevity of mobile robots. In contrast, the efficiency of Spiking Neural Networks, both in terms of energy consumption and computational performance, has been well-established, making them particularly enticing for applications involving mobile robotics. Hence, the primary objective of this project was to leverage the potential of Spiking Neural Networks within the framework of Deep Reinforcement Learning for controlling the Franka Research 3 robot. To achieve this, a population-coded Spiking Actor Network was trained to reach random target positions inside the workspace of the robot, by controlling the joint velocities of the FR3. After training the agent successfully controlled the robot in both the simulation and the real world. Thus, the energy consumption was drastically reduced compared to a deep neural network.
In the realm of domestic environments, the adaptability of robots to dynamic conditions is crucial. Deep Reinforcement Learning stands as an available tool to grant robots the ability to acquire dynamic behavioural policies independently. However, the current iteration of Deep Neural Networks consumes a substantial amount of energy, thereby directly impacting the operational longevity of mobile robots. In contrast, the efficiency of Spiking Neural Networks, both in terms of energy consumption and computational performance, has been well-established, making them particularly enticing for applications involving mobile robotics. Hence, the primary objective of this project was to leverage the potential of Spiking Neural Networks within the framework of Deep Reinforcement Learning for controlling the Franka Research 3 robot. To achieve this, a population-coded Spiking Actor Network was trained to reach random target positions inside the workspace of the robot, by controlling the joint velocities of the FR3. After training the agent successfully controlled the robot in both the simulation and the real world. Thus, the energy consumption was drastically reduced compared to a deep neural network.