Wissenschaftliches Rechnen mit SciPy
Contents
7. Wissenschaftliches Rechnen mit SciPy¶
Das Python-Modul SciPy ist eine Sammlung mathematischer Algorithmen, welche überwiegend im wissenschaftlichen Rechnen Anwendung finden. Das Modul ist in verschiedene Untermodule unterteilt. Die wichtigsten sind:
scipy.fftpack: Schnelle Fourier-Transformationscipy.integrate: Algorithmen zur numerischen Integration und Löser für Differentialgleichungenscipy.interpolate: Polynom- und Splineinterpolationscipy.linalg: Lineare Agebra, Rechnen mit Matrizen und Vektorenscipy.optimize: Algorithmen zur Lösung von beschränkten und unbeschränkten Optimierungsproblemenscipy.signal: Signalverarbeitungscipy.sparse: Speicherformate für dünn-besetzte Matrizenscipy.stats: Wahrscheinlichkeitsverteilungen und statistische Berechnungen
Gegebenenfalls müssen wir SciPy zunächst installieren, beispielsweise mit
conda install -c conda-forge scipy
Im Folgenden wollen wir uns einige dieser Pakete genauer anschauen.
7.1. Numerische Integration mit scipy.integrate¶
7.1.1. Numerische Integration¶
Wir haben im Abschnitt Computeralgebra mit SymPy bereits eine Methode kennengelernt um Intgrale zu berechnen. Dort wurden allerdings symbolische Berechnungen durchgeführt, das heißt, es wurde versucht ein Integral exakt auszurechnen. Bei zu schwierigen Integralen kam SymPy allerdings auch an seine Grenzen. Wir stellen daher hier einen anderen Ansatz vor, die numerische Integration.
Zunächst klären wir kurz, wie numerische Integration überhaupt funktioniert. Die Idee ist, die Funktion beispielsweise durch eine Treppenfunktion oder durch ihre stückweise lineare Interpolierende zu ersetzen:
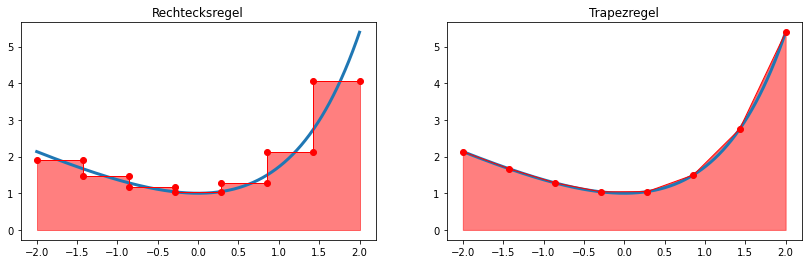
Für derartige Funktionen kann die Fläche, welche der Funktionsgraph mit der
Analog kann man auch eine Quadraturformel für die zusammengesetzte Trapezregel herleiten:
7.1.2. Bestimmte Integrale berechnen¶
Quadraturformeln, wie oben beschrieben, sind im Submodul scipy.integrate implementiert. Wir inkludieren dieses Submodul und schauen uns den Hilfetext der wichtigsten Funktion quad (quadrature) an:
import scipy.integrate as si
si.quad?
Als Funktionsparameter benötigt scipy.integrate.quad einen Zeiger auf die zu integrierende Funktion sowie die Integrationsgrenzen. Der Rückgabewert ist ein Tupel, welches den Wert des Integrals an erster Stelle und den geschätzten Integrationsfehler an zweiter Stelle beinhaltet. Ein einfaches Beispiel liefert:
import math
def f(x):
return math.exp(x)-x
res,err = si.quad(f, -2., 2.)
print("Integral :", res)
print("Geschätzter Fehler :", err)
Integral : 7.253720815694037
Geschätzter Fehler : 8.053247863786291e-14
7.1.3. Mehrfachintegrale¶
Auch Doppel- und Dreifachintegrale (oder auch Flächen- und Volumenintegrale) lassen sich mit scipy.integrate berechnen. Angenommen wir möchten ein Skalarfeld
integrieren. Die Integration ist also nicht nur auf Rechtecksgebiete (
In folgendem Beispiel wird die Funktion
def f(y,x):
return x**2*math.exp(y)
def g(x):
return 0
def h(x):
return 1-x
res, err = si.dblquad(f, 0, 1, g, h)
print("Integral :", res)
print("Geschätzter Fehler :", err)
Integral : 0.10323032358475713
Geschätzter Fehler : 1.9673235155680954e-15
Auf analoge Weise kann mit der Funktion scipy.integrate.triquad ein Dreifachintegral (Volumenintegral) berechnet werden.
7.2. Optimierungsprobeme mit scipy.optimize¶
7.2.1. Vorüberlegung¶
Mit dem Submodul scipy.optimize können wir Optimierungsprobleme der Form
lösen. Beachte, dass natürlich Box-Beschränkungen auch Ungleichungsnebenbedingungen sind, aber es gibt Optimierungsverfahren, die speziell auf Probleme mit Box-Beschränkungen zugeschnitten sind und unter Ausnutzung dieser Struktur auch effizienter sind. Falls keine Nebenbedingungen gegeben sind spricht man von einem unbeschränkten Optimierungsproblem. Schauen wir uns zunächst an wie wir derartige Optimierungsprobleme lösen können. Wir inkludieren dazu das Submodul und lesen den Hilfetext der wichtigsten Funktion, minimize, durch:
from scipy import optimize
optimize.minimize?
Als Funktionsparameter wird mindestens ein Zeiger auf die Zielfunktion in der Syntax
def f(x):
return x**2
und ein Startwert x0 benötigt:
import numpy as np
def f(x):
return np.power(x, 3) - np.power(x, 2) - 15*x
x0 = 0
sol = optimize.minimize(f, x0)
sol
fun: -28.18423549805634
hess_inv: array([[0.07377656]])
jac: array([-1.66893005e-06])
message: 'Optimization terminated successfully.'
nfev: 16
nit: 4
njev: 8
status: 0
success: True
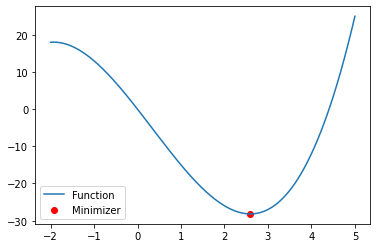
x: array([2.59410986])
Der Rückgabeparameter ist eine Struktur vom Typ OptimizeResult und speichert neben der Lösung sol.x auch weitere nützliche Informationen. So lesen wir beispielsweise ab, dass der Algorithmus f 16 mal und die Jacobi-Matrix
Plotten wir doch einfach mal unsere Funktion und schauen, ob die Lösung Sinn macht:
import matplotlib.pyplot as plt
x = np.linspace(-2,5,1000)
y = f(x)
plt.plot(x,y)
plt.scatter(float(sol.x[0]), sol.fun, marker='o', color='red')
plt.legend(['Function', 'Minimizer'])
plt.show()
7.2.2. Unrestringierte Optimierungsprobleme¶
Was ist innerhalb der Funktion minimize eigentlich passiert? Es wurde, abhängig von der Problemstellung, ein numerisches Verfahren zur Lösung dieses Optimierungsproblems ausgewählt und auf das Problem angewendet. Die meisten numerische Verfahren für unbeschränkte Optimierungsprobleme erzeugen eine Folge
wobei
Das einfachste dieser Verfahren ist das sogenannte Gradientenverfahren, bei dem die Suchrichtung berechnet wird durch
Eine geeignete Schrittweite ergibt sich durch qualifiziertes “durchtesten”, beispielsweise mit “Armijo-Backtracking”. Da wir den Gradienten nicht an minimize übergeben haben, wird dieser durch einen Finite-Differenzen-Approximation ersetzt. Der Algorithmus würde aber besser funktionieren, wenn wir den Gradienten mit angeben:
def Df(x):
return 3*np.power(x, 2) - 2*x - 15
sol = optimize.minimize(f, x0, jac=Df)
sol
fun: -28.184235498056328
hess_inv: array([[0.07377658]])
jac: array([-1.95168971e-06])
message: 'Optimization terminated successfully.'
nfev: 8
nit: 4
njev: 8
status: 0
success: True
x: array([2.59410985])
Im Vergleich zu unserem ersten Versuch haben wir uns hier einige Funktionsauswertungen gespart (nämlich die, die zur Berechnung der Gradientenapproximation benötigt werden).
In der Tat ist nun noch ungewiss, welcher Optimierungsalgorithmus genau angewendet wurde. In den meisten Fällen wird ein (Quasi)-Newton-Verfahren verwendet bei dem die Suchrichtung durch
gegeben ist. Beachte, dass hier ein Gleichungssystem mit der Hessematrix minimize-Funktion übergeben:
def DDf(x):
return 6*x - 2
sol = optimize.minimize(f, x0, jac=Df, hess=DDf, method="Newton-CG")
sol
fun: -28.184235498056466
jac: array([0.00010172])
message: 'Optimization terminated successfully.'
nfev: 7
nhev: 5
nit: 5
njev: 7
status: 0
success: True
x: array([2.59410999])
Wir haben hier noch explizit angegeben, dass minimize das oben beschriebene Newton-Verfahren anwenden soll.
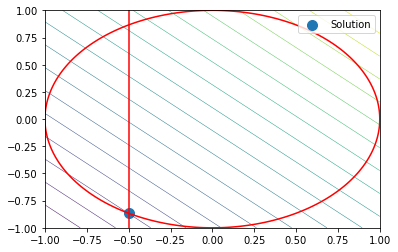
7.2.3. Optimierungsprobleme mit Nebenbedingungen¶
Betrachten wir ein zweites Optimierungsproblem mit Zielfunktion
und je einer Gleichungs- und Ungleichungsnebenbedingung
Wir definieren zunächst Zielfunktion, Gradient und die Nebenbedingungen:
# Zielfunktion
def f(x):
return x[0] + x[1]
# Gradient der Zielfunktion
def Df(x):
return np.array([1.,1.])
# Equality constraint
def h(x):
return x[0]**2 + x[1]**2 - 1
# Jacobian of equality constraint
def Dh(x):
return np.array([2*x[0], 2*x[1]])
constraints = [{'type': 'eq', 'fun': h, 'jac': Dh}]
bounds = [(-0.5,None), (None,None)]
x0 = np.array([-0.2,0.])
sol = optimize.minimize(f, x0, jac=Df, bounds=bounds, constraints=constraints)
sol
fun: -1.3660254050073637
jac: array([1., 1.])
message: 'Optimization terminated successfully'
nfev: 5
nit: 5
njev: 5
status: 0
success: True
x: array([-0.5 , -0.86602541])
x = y = np.linspace(-1,1,1000)
[X,Y] = np.meshgrid(x,y)
Z = f([X,Y])
H = h([X,Y])
# Zeichne Zielfunktion
plt.contour(X,Y,Z, linewidths=.5, levels=np.linspace(np.min(Z), np.max(Z), 20))
# Zeichne Nebenbedingung h(x,y)=0
plt.contour(X,Y,H, levels=[0.], colors="red")
# Zeichne Box-beschränkung
plt.plot([-0.5, -0.5], [-1., 1.], 'r-')
# Zeichne Lösung
plt.scatter(sol.x[0], sol.x[1], marker="o", s=100, label="Solution")
plt.legend()
plt.show()