Hinweise zur Programmierung der Roboter
Allgemeine Hinweise
- Die ausführliche Dokumentation der verfügbaren Softwarebibliothek ist als Online-Version verfügbar. Diese Dokumentation enthält auch einige Beispielprogramme, die die grundlegende Programmierung des Roboters zeigen.
- Das Nutzen der Softwarebibliothek wird über einen Link auf einen Netzwerkspeicher realisiert. Dieser wurde bereits für jeden Nutzer im Home-Verzeichns des Arbeitsplatzrechners eingerichtet (
~/PMR_Materialien). Notwendige Internas, zum Beispiel Skripte zum Compilieren Ihrer Programme und zum Übertragen dieser an den Roboter, sind hier gespeichert. Außerdem befinden sich im Verzeichnis einige Dokumentationen und Datenblätter zu den auf dem Roboter verbauten Sensoren. - Für die Programmierung der Roboter haben wir die Programmierumgebung VSCodium vorinstalliert. Hier einige Hinweise:
- Ein neues Projekt benötigt entsprechende Einstellungen. Dafür muss der Ordner
.vscode aus~/PMR_Materialien/lib/tools/editor_config/vscode/workspacein den Workspace-Ordner kopieren. - Zum Start in der Konsole "
codium ." im Workspace-Order ausführen. Alternativ können Sie auch Codium über den Desktop öffnen und über "Open Folder" Ihr Projektverzeichnis anwählen.
- Ein neues Projekt benötigt entsprechende Einstellungen. Dafür muss der Ordner
C++ Erweiterung für VSCodium
VSCodium bietet ein Interface für eine Vielzahl von Erweiterungen an, mit dem sich die Programmierung vereinfachen lässt. Eine dieser Erweiterungen ist beispielsweise "C/C++" von Microsoft. Damit erhalten Sie unter anderem Syntax-Highlighting (ähnlich zur Rechtschreibprüfung bei Schreibprogrammen), um kleinere Fehler schon vor dem Kompilieren zu finden. Die Erweiterung ist nicht im Repository von VSCodium verfügbar, kann aber per Hand nachinstalliert werden. Gehen Sie dazu folgendermaßen vor
-
Rufen Sie die Erweiterung im Visual Studio Marketplace von Microsoft auf
-
In der rechten Spalte finden Sie eine Option um die Erweiterung herunter zu laden ("Download Extension"). Wählen Sie hier die Version für Linux x64 aus.
-
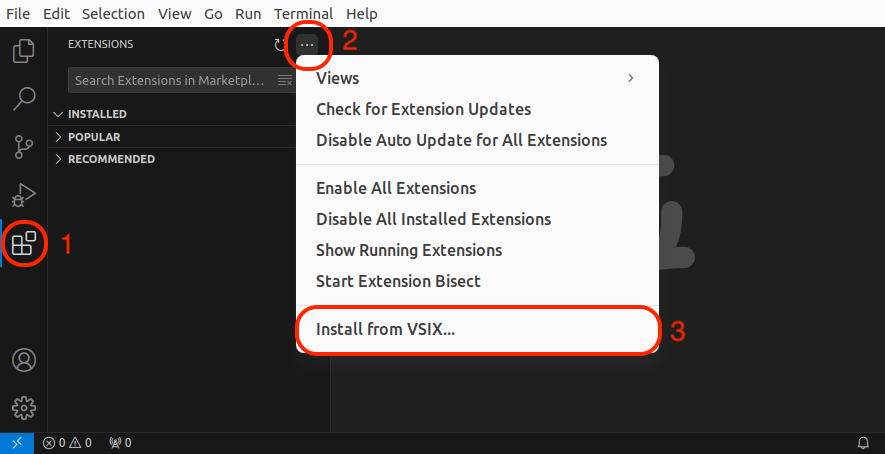
Öffnen sie Codium und gehen Sie in das Menü für Erweiterungen (siehe Markierung 1 im Bild)
-
Klicken Sie auf die drei Punkte (Markierung 2) oben rechts und dann auf "Install from VSIX" (Markierung 3)
-
Wählen Sie nun die eben heruntergeladene Erweiterung aus
-
Ggf. müssen Codium neu laden, damit die Erweiterung aktiv wird (SHIFT+STRG+P, "Developer: Reload Window")
Die Einstellungen für die Erweiterung befinden sich in der Datei .vscode/c_cpp_properties.json. Diese wurden für die Toolchain des Praktikums schon eingerichtet.
Benutzen des Build-Systems
-
Codium arbeitet mit seinem eigenen Build-System, sogenannten Build-Tasks. Diese sind für das Praktikum schon fertig konfiguriert und müssen nur noch in den jeweiligen Projektordner kopiert werden.
-
Im Ordner
~/PMR_Materialien/lib/tools/editor_config/vscode/workspacefinden sie einen Versteckten Ordner namens.vscode -
Kopieren Sie diesen Ordner in Ihren Projektordner. Das kann beispielsweise über einen Dateimanager passieren (beachten Sie, dass Sie die Option setzen müssen, versteckte Dateien anzuzeigen).
-
Damit Codium diese Einstellungen auch lädt, müssen Sie die App aus Ihrem Projektordner heraus starten. Alternativ können Sie Codium über den Desktop starten und "Open Folder" zu Ihrem Projektordner navigieren. Wenn der Ordner
.vscodein der Seitenleiste auf der obersten Ordnerebene angezeigt wird, wurden die Einstellungen auch geladen. -
Bevor es los gehen kann, muss der Roboter in den Programmiermodus versetzt werden. Halten Sie dazu den Taster ganz rechts gedrückt, während Sie den Roboter anschalten. Im Display erscheint Bootloader Vx.x USB
-
Alternativ können Sie den Roboter auch über Funk programmieren. Halten Sie dazu den mittleren Taster beim starten gedrückt.
-
-
Verbinden Sie den Roboter mit einem USB-Kabel mit dem Computer
-
Öffnen Sie die Quelldatei in Codium, die Sie kompilieren möchten. Klicken Sie in der Menüleiste oben unter "Terminal" auf "Run Build Task" . Wenn die Einstellungen aus .vscode richtig eingelesen wurden, stehen Ihnen nun folgende Tasks zur Verfügung:
-
"TUCbot" kompiliert das Programm. Sie können diesen Task nutzen, um Compiler-Errors zu finden, ohne das Programm auf den Roboter zu kopieren
-
"TUCbot Program" kompiliert das Programm und überträgt es auf den Roboter. Diesen Task werden Sie im Praktikum hauptsächlich benutzen.
-
"TUCbot Clean" löscht alle temporären Dateien auf Ihrem Computer.
-
-
Alternativ kann die Programmierung auch über die Kommandozeile erfolgen:
make -f ~/PMR_Materialien/lib/Makefile.project TARGET=motor_kennlinie program -
Wenn alles funktioniert hat, wird das Programm gebaut und übertragen.




