|
|
Die grafische Oberfläche stellt nicht nur die errechneten Bahnverläufe eines Bewegungsplanes dar, sondern bietet dem Benutzer auch die Möglichkeit, interaktiv Änderungen an den Verläufen vorzunehmen. Per Mauseingabe besteht die Möglichkeit, Bewegungspunkte im Diagramm zu verschieben. Dabei sind je nach Bewegungsgesetz Manipulationen bis zur 6. Ordnung möglich.
|
|
|
|
|
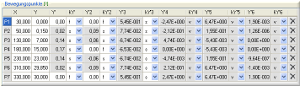
Neben der grafischen Darstellung bieten tabellarische Auflistungen auch eine numerische Aufbereitung und Manipulation aller Kennwerte einer Bewegungsaufgabe.
|
|
|
|
|
Verarbeitung und Darstellung der Änderungen in Echtzeit.
|
|
|
|
|
Für jeden Bewegungsabschnitt stehen über 30 Bewegungsgesetze (VDI-Richtlinie 2143, diverse speziell angepasste Polynomfunktionen, u.w.) zur Auswahl. Diese Bibliothek an Gesetzen kann über einen speziellen Dialog nachträglich, durch Angabe von Teilabschnitten und deren Koeffizienten (Polynom 13. Grades), erweitert werden.
|
|

|
|
|
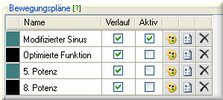
Das System ermöglicht die gleichzeitige Verarbeitung und individuelle Visualisierung beliebig vieler Bewegungsaufgaben in Form von Bewegungsplänen.
|
|
|
|
|
Alle Eigenschaften und Parameter einer Bewegungsaufgabe (Bewegungsprofil, Getriebeabmessungen und globale Einstellungen) können in einem aufgabenspezifischen Projekt oder separat gespeichert werden.
|
|
|
|
|
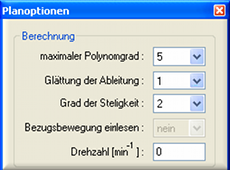
Das Programm bietet die Möglichkeit, automatisch die Randwerte einer Bewegungsaufgabe nach der Vorgabe des maximalen Polynomgrades und des Grades der Stetigkeit zu berechnen. Eine Beeinflussung des Bewegungsverlaufs kann allerdings ebenso durch Benutzervorgaben oder über ein globales Glättungskriterium erfolgen. Wird ein stetiger Übergang gefordert, so wird dem Randwert einfach diese Eigenschaft zugeordnet. Die Anzahl der veränderbaren Randwerte richtet sich nach dem Grad des Polynoms.
|
|
|
|
|
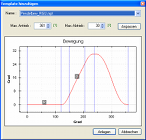
Die Programmoberfläche beinhaltet eine Liste von vorgefertigten Bewegungsaufgaben (Templates). Diese Vorlagen ermöglichen das Anlegen eines Bewegungsprofils mit nur wenigen Handgriffen. Die Liste der Templates kann nachträglich durch den Benutzer jederzeit vergrößert werden.
|
|
|
|
|
Neben der Dateiausgabe existiert auch eine direkte Verbindung zu einer Compax3-Steuerung. Diese Schnittstelle überträgt die Werte des aktuellen Bewegungsverlaufes über einen COM-Port direkt in die Steuerung.
|
|

|
|
|
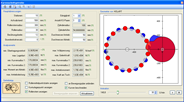
Ein spezielles Modul berechnet für benutzerdefinierte Getriebeabmessungen die Kurvenkonturen für ebene und räumliche Kurven- bzw. Kurvenschrittgetriebe. Durch direkte Verknüpfung aller Programmteile wirken sich Anpassungen am Bewegungsprofil direkt auf die Kurvenkontur des Getriebes aus. Die Benutzereingaben sowie die Visualisierung und Animation der Getriebe erfolgen dabei über den Getriebedialog. Zur besseren Einordnung der Berechnungsergebnisse werden zusätzlich verschiedene Analysewerte sowie Kräfteverläufe ausgegeben. Eine Optimierung der Abmessungen hinsichtlich ausgewählter Parameter ist ebenso realisierbar.
|
|

|
|
|
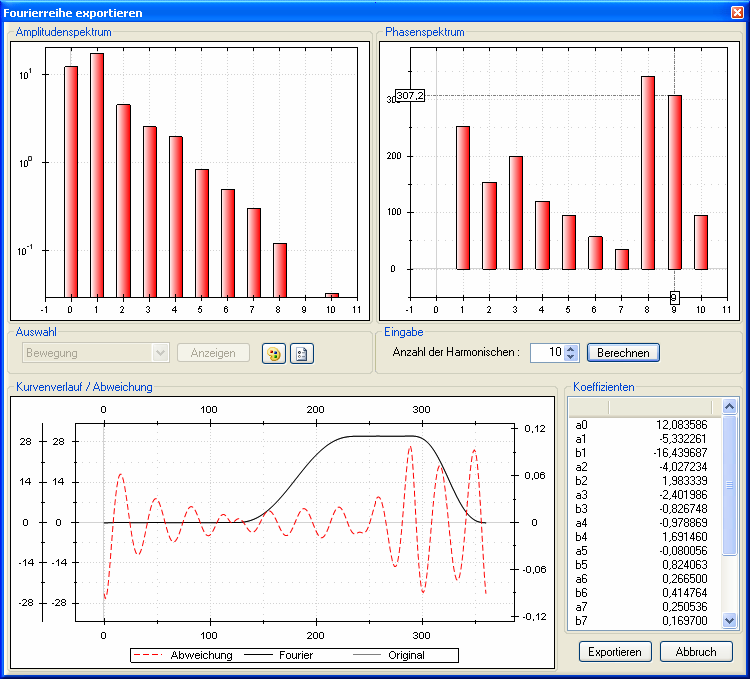
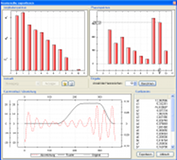
Über verschiedene Export-Schnittstellen können alle relevanten Programmdaten (Bewegungsverläufe, Konturdaten, usw.) in ASCII-formatierte Dateien abgelegt werden. Eine Approximation der Bewegungsfunktion als Fourierreihe und Rückgabe der Fourierkoeffizienten ist ebenso möglich. Neben dem Datenexport in eine ASCII-formatierte Datei wird zusätzlich auch die Erstellung eines Planprotokolls in PDF-Format angeboten.
|
|
|
|
|
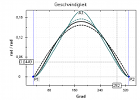
Toleranzgrenzen (im Bild blau dargestellt) ermöglichen die Überwachung der Minimal- und Maximalwerte (1. bis 3. Ordnung sowie des dynamischen Momentenkennwertes) einer Bewegungsfunktion. Beim Verletzen dieser Grenzwerte wird entweder ein grafischer Hinweis an den Benutzer ausgegeben (rote Markierung) oder die Änderung des Bewegungsplanes wird programmseitig abgewiesen. Wie das Programm in solchen Fällen reagiert, steht Ihnen dabei frei.
|
|
|
|
|
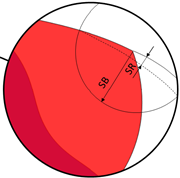
Eine Anpassung der erstellten Konturen von ebenen Kurvenschrittgetrieben kann mit Hilfe eines zusätzlichen Moduls erfolgen. Dieses bietet die Möglichkeit, die Spitzen der Konturen abzurunden und einen entsprechenden Bereich der Arbeitskurve freizuschneiden. Dadurch soll ein Verklemmen des Getriebes verhindert werden. Außerdem wird eine Korrektur des Rastbereiches (Rastkreis) durch Angabe eines Aufmaßes für die Rast auf Wunsch realisiert.
|
|
|
|
|
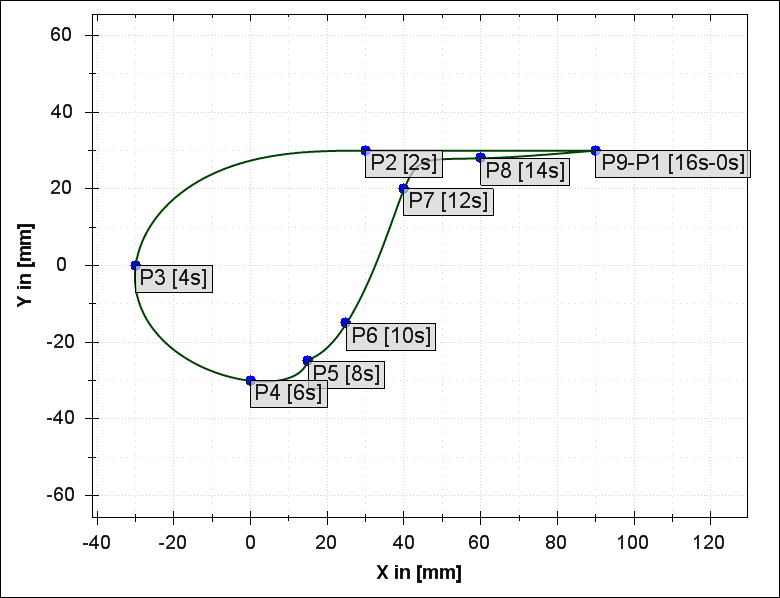
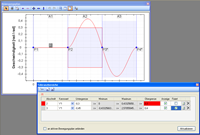
Durch Verknüpfung zweier Bewegungspläne X(t), Y(t) und Z(t) lässt sich eine räumliche Punktführung realisieren. Die Manipulation des Bahnverlaufes geschieht grafisch interaktiv in einem Diagramm durch Verschieben einzelner Stützpunkte oder durch direkte Werteingabe in Tabellen. Ein stetiger Verlauf der Bewegungen bis hin zur 6. Ableitung wird durch konsequente Anwendung der automatischen Polynominterpolation garantiert.
|
|

|
|
|
Neben der lokalen Sicherung des Programmes über einen USB-Dongle besteht auch die Möglichkeit, mehrere Rechner in einem lokalen Netzwerk über einen Server mit Lizenzen zu versorgen.
|
|
|
|
|
Die Möglichkeit Kommentare einzufügen, führt zu einem besseren Verständnis der Projektdaten. Individuelle Textpassagen können dabei ausgewählten Parametern zugeordnet werden. Diese Kommentare sind dann in den Eingabefeldern durch Symbole markiert und Erscheinen beim Berühren mit dem Mauszeiger.
|
|
|
|
|
Eine Import-Schnittstelle bietet die Möglichkeit, externe Bewegungsverläufe über Vorgabe von Stützpunkten in das Programm zu Laden. Diese sind dann als statische Bewegungsprofile für weitere Berechnungen nutzbar. Sollten die Ableitungen der Bewegung nicht vorhanden sein, können diese entweder diskret oder über eine Fourier-Approximation ermittelt werden.
|
|
|
|
|
Mindestens zwei Bewegungspläne lassen sich durch Addition und durch Angabe eines Skalierungsfaktors miteinander kombinieren, um daraus einen neuen Bewegungsplan zu erzeugen. Dieser kann für weitere Berechnungen weiter genutzt werden.
|
|
|