

Im Entwicklungsmodus ist es z.B. möglich Testdaten mit dem Laustrackersystem über das XBEE-Funkmodul an den Roboter zu senden. Dadurch entsteht folgender Aufbau des Systems.
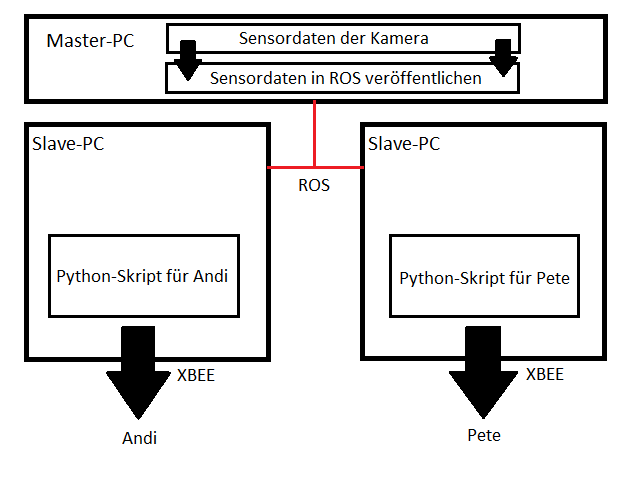
Dabei läuft auf dem Master-PC das Laustrackerprogramm und veröffentlicht alle Positionsdaten zu den Robotern, die im Labyrinth gefunden werden. Dies wurde bereits eingerichtet und muss daher nicht bearbeitet werden. Am Slave-PC hingegen können die Daten abgerufen werden und über das vorgefertigte Pythonskript trackdata.py an den Roboter gesendet werden. Um dieses zu starten muss das zum Roboter passende XBEE-Funkmodul an den Slave-PC angeschlossen werden. Anschließend kann über die Konsole das Pythonskript gestartet werden. Dies geschieht indem der folgende Befehl eingegeben wird:
rosrun com2tucbot trackread.py -r andi
Hierdurch wird das Pythonskript gestartet, welches die zu jedem Roboter zugehörigen Daten sucht und diese kontinuierlich an den Roboter sendet. Dabei kann mit den Optionsbefehlen, welche beim Programmstart zum Befehl hinzugefügt werden, das Programm beeinflusst werden.
| -r andi | eigener Robotername z.B. Andi |
| -t true | Testmodus zum Senden von Beispielwerten an den Roboter |
Jetzt sucht der Slave-PC die Daten des Roboters aus den veröffentlichten Daten heraus und sendet diese kontinuierlich an den eigenen Roboter. Zum Finden des Roboters, müssen dessen Leds im Labyrinth an sein. Diese können intern an/aus geschaltet werden, sobald auch der Schalter auf der rechten Seite des Roboters angeschaltet ist. Mit Strg-C in der Konsole in der das Pythonskript gestartet wurde, kann es auch wieder geschlossen werden. Wie diese Daten ausgewertet werden können ist in einem Beispiel in der Dokumentation veranschaulicht.
