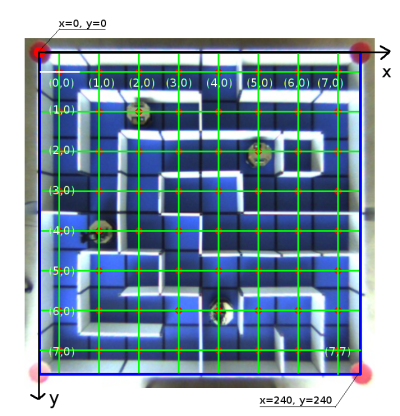
Für das Praktikum mobile Robotik wurde eine Art künstliches GPS entwickelt. Hierzu wurde über dem Labyrinth eine Kamera befestigt, welche mit einem PC verbunden ist. Auf diesem PC werden die Kamerabilder ausgewertet. Dabei werden die Labyrinth-ecken bestimmt und dadurch die Labyrinthposition herausgefunden. Das Labyrinth dient nun als eine Art Koordinatensystem, in welchem die Roboter gesucht werden. Dabei helfen Leds, die sich auf dem Roboter befinden. Durch die unterschiedliche Anordnung der Leds zueinander, ist es möglich die Roboter zu unterscheiden und deren einzelnen Positionen zu bestimmen. Die dabei entstandenen Daten werden vom PC aus über das Robot Operating System (ROS) im Netzwerk veröffentlicht. Danach können diese über ein Pythonskript an einem anderen PC ausgelesen, bearbeitet und zum Roboter gesendet werden.
Eine kurze Erklärung zum Robot Operating System (ROS) befindet sich auf der folgenden Seite:
Um das Laustrackerprogramm zu aktivieren, ist es für jede Praktikumsgruppe möglich, sich am Master-PC auf einem gegebenen Benutzerkonto einzuloggen. Anschließend kann dort mithilfe der Konsole der folgende Befehl eingegeben werden:
roslaunch ltserver startcam.launch
Damit wird das Veröffentlichen von Daten gestartet und eine 2D Grafik des aktuellen Labyrinths angezeigt.
Wird das Programm nicht mehr gebraucht, kann es mit Strg+C in der Konsole beendet werden.
Für die Benutzung des Laustrackersystems während des Praktikums sind die folgenden zwei Konfigurationen erstellt worden: