Research Area Perception
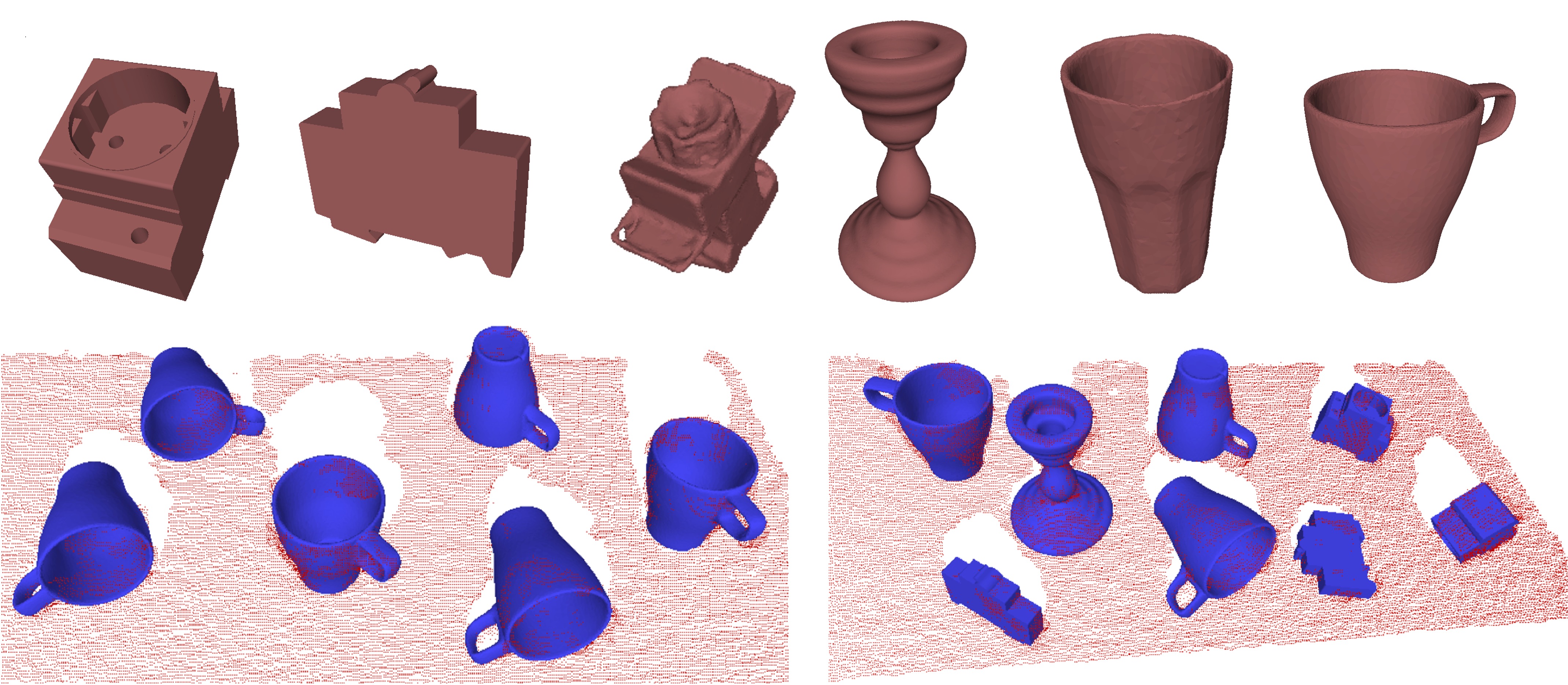 |
Object Pose Estimation
|
3D Reconstruction and Next Best View Planning
|
 |
 |
Bin Picking
|
Eye Gaze Tracking and Action Recognition
|
 |
Hand and Object Pose Tracking
|
|
New Sensors
|
 |
 |
Environmental Perception
|
| Contact | Prof. Dr.-Ing. Ulrike Thomas |
| Funded by |




